palRevoluteLink Class Reference
#include <palLinks.h>
Inheritance diagram for palRevoluteLink:

Public Member Functions | |
| virtual void | Init (palBodyBase *parent, palBodyBase *child, Float x, Float y, Float z, Float axis_x, Float axis_y, Float axis_z) |
| virtual void | SetLimits (Float lower_limit_rad, Float upper_limit_rad) |
| virtual void | GetPosition (palVector3 &pos) |
| virtual Float | GetAngle () |
| virtual Float | GetAngularVelocity () |
| virtual void | ApplyTorque (Float torque) |
| virtual void | ApplyAngularImpulse (Float torque) |
Detailed Description
A Revolute Link A revolute link (also known as a hinge) provides one degree of rotational freedom for the constraint. The link connects two bodies, at a given position, and rotates around a specified axis.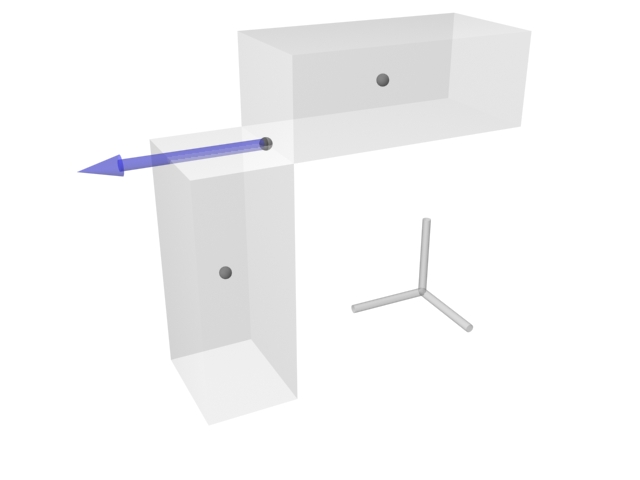
Member Function Documentation
| void palRevoluteLink::ApplyAngularImpulse | ( | Float | torque | ) | [virtual] |
Applies a torque to act on the link
| void palRevoluteLink::ApplyTorque | ( | Float | torque | ) | [virtual] |
Applies a torque to act on the link
| Float palRevoluteLink::GetAngle | ( | ) | [virtual] |
Gets the current angle (in radians) between the two connected bodies.
- Returns:
- Angle (radians) between the two connected bodies.
| Float palRevoluteLink::GetAngularVelocity | ( | ) | [virtual] |
Gets the current angular velocity
| void palRevoluteLink::GetPosition | ( | palVector3 & | pos | ) | [virtual] |
Retrieves the position of the link as a 3 dimensional vector.
- Parameters:
-
pos A three dimensional vector representing the links position
| void palRevoluteLink::Init | ( | palBodyBase * | parent, | |
| palBodyBase * | child, | |||
| Float | x, | |||
| Float | y, | |||
| Float | z, | |||
| Float | axis_x, | |||
| Float | axis_y, | |||
| Float | axis_z | |||
| ) | [virtual] |
Initializes the revolute link.
- Parameters:
-
parent The "parent" body to connect child The "child" body to connect x The x position of the link's center y The y position of the link's center z The z position of the link's center axis_x The vector about which the link rotates. (x) axis_y The vector about which the link rotates. (y) axis_z The vector about which the link rotates. (z)
| void palRevoluteLink::SetLimits | ( | Float | lower_limit_rad, | |
| Float | upper_limit_rad | |||
| ) | [virtual] |
Constrains the movement of the revolute link. This limits the ammount of movement of the link.
- Parameters:
-
lower_limit_rad The lower angular limit of movement. (raidans) upper_limit_rad The upper angular limit of movement. (raidans)
The documentation for this class was generated from the following files:
- /var/www/hosted/adrianboeing.com/pal/current/pal/pal/pal/palLinks.h
- /var/www/hosted/adrianboeing.com/pal/current/pal/pal/pal/palLinks.cpp