Introduction
ImprovCV is a portable, open source, modular computer vision system that enables rapid, interactive computer vision development.
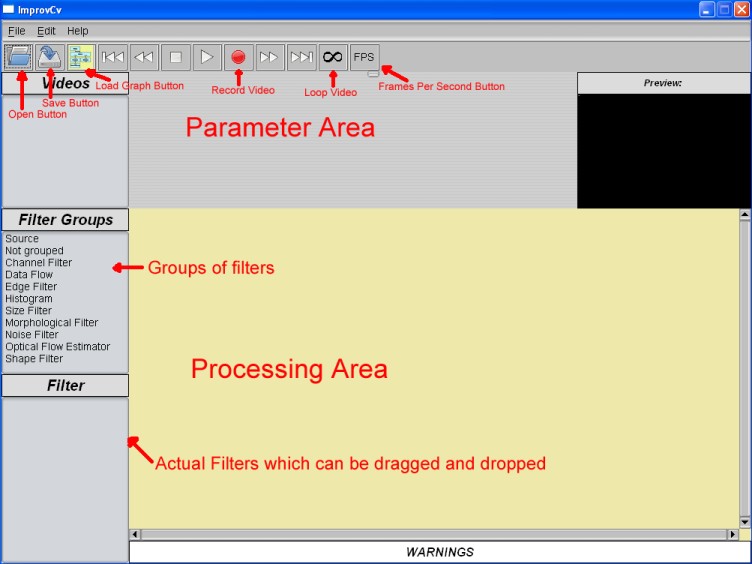
ImprovCV is a lightweight component based dataflow vision processing system. Each vision processing filter is its own component that can be dynamically plugged in using the dataflow based GUI to connect between any other filter. This enables the reuse of vision processing components and fast experimentation and visialization of varying parameter settings.
It is built ontop of OpenCV a proven open source computer vision library.
Users can drag and drop components into the data flow graph and experiment with the filter parameters. Immediate feedback is provided in the preview window and in the final result. Filters can operate on any data type, and are not just restricted to operating on images.
ImprovCV is real-time capable and highly portable and has been used on autonomous automotive vehicles, small mobile robots, and simulation systems.
^ topSource Code
This project uses:- OpenCV [http://sourceforge.net/projects/opencvlibrary/] (Open source)
- FLTK [http://www.fltk.org/] (Open source)
- Boost Graph Library [http://www.boost.org/] (Open source)
Contributors
This project was initiated at the Technical University, Munich, supported under the CogniMobil grant. (A. Boeing, T. Braunl.)ImprovCV was continued at:
University of Federal Armed Forces, Munich. (A. Boeing.)
University of Western Australia (S. Hawe, P. Ruud, A. Boeing, T. Braunl)
Edith Cowan University (A. Boeing)
^ top